After adding a nice tilt servo base, you can attach a camera or a hand gripper. There are a few version of the hand gripper for a mid-size servo. Make sure it is light enough to be attached to an existing robot-car chassis.

Two basic movements of the servo are basically: grip and release.
Find the neutral position of the servo then you can find the right angular position for the grip and release. You can attach this to a Gertboard, Arduino-compatible, or directly to the Pi GPIO. Combined with the tilt kit, it will create the following movement combinations:
- Down – Release
- Down – Grip
- Neutral – Grip (hold)
- Neutral – Release
- Up – Grip
- Up – Release
Try if you can pick up a small item like Lego person or a puffy mouse like below.
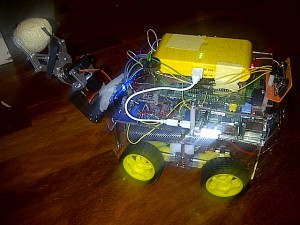
Gripping Robot
Finally a control interface should be added to let us interact with all these goodies.
(Visited 1,079 times, 1 visits today)


