Raspberry Internet Rover Part 1 – Robotics Basics
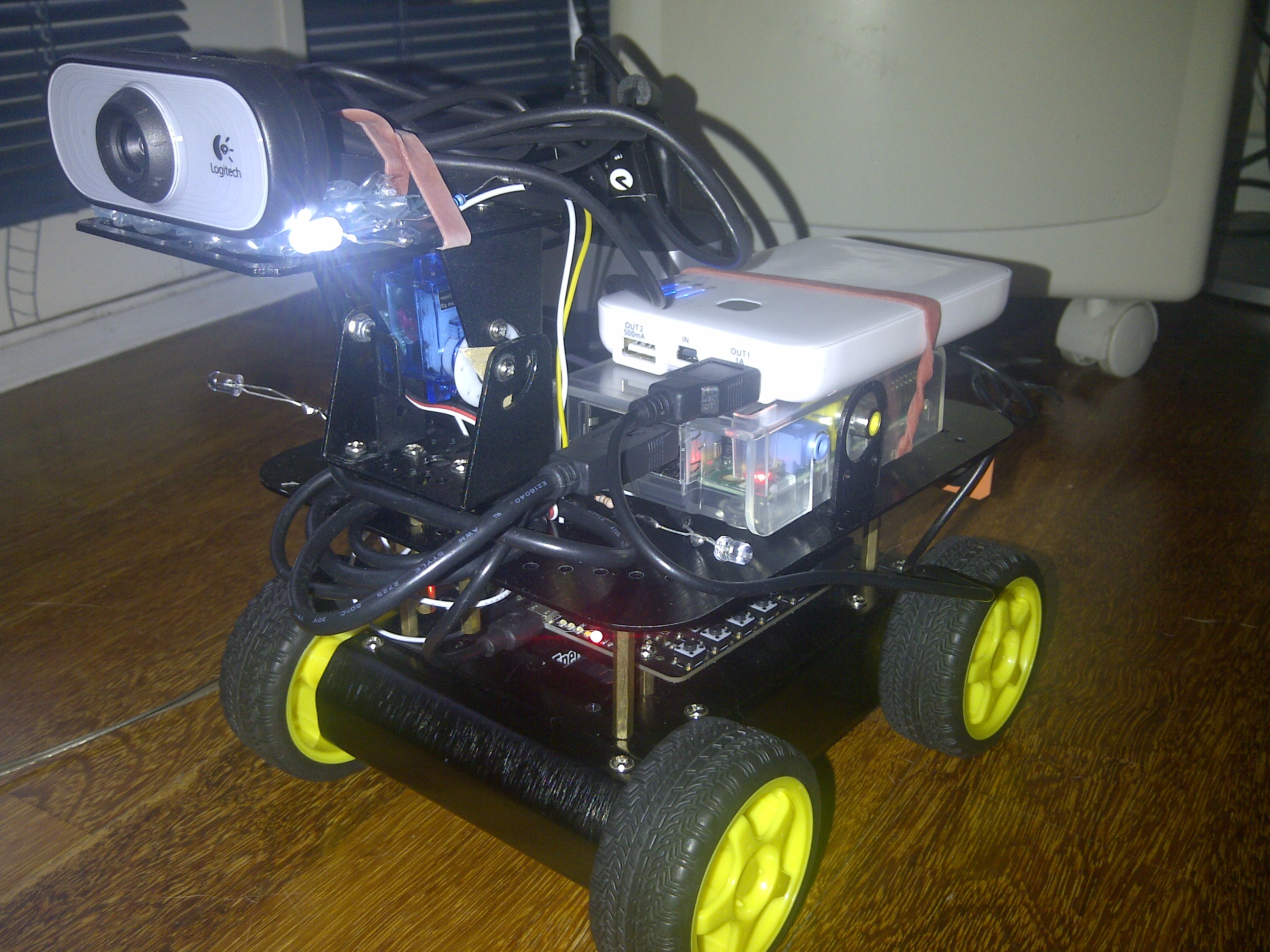
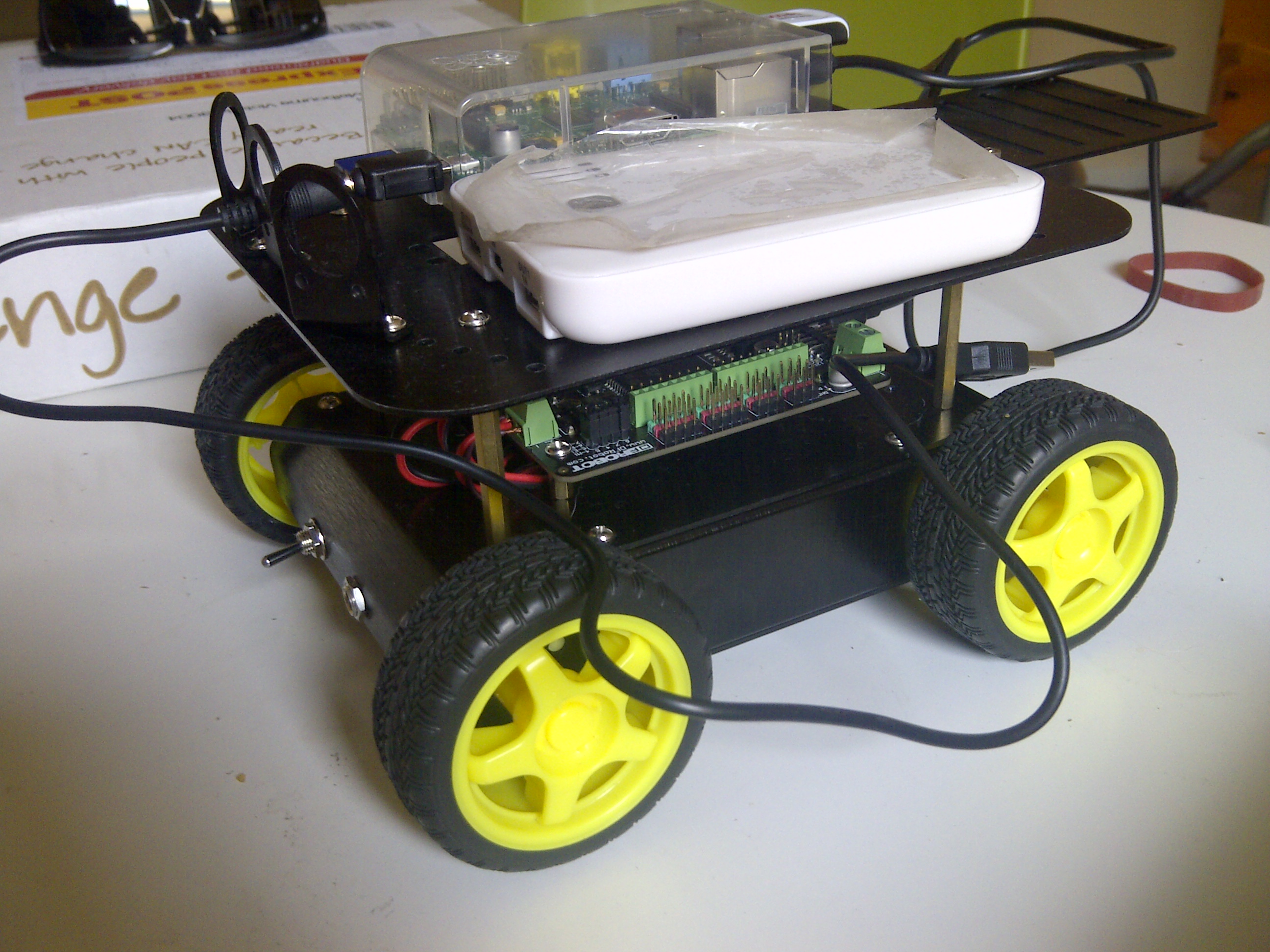
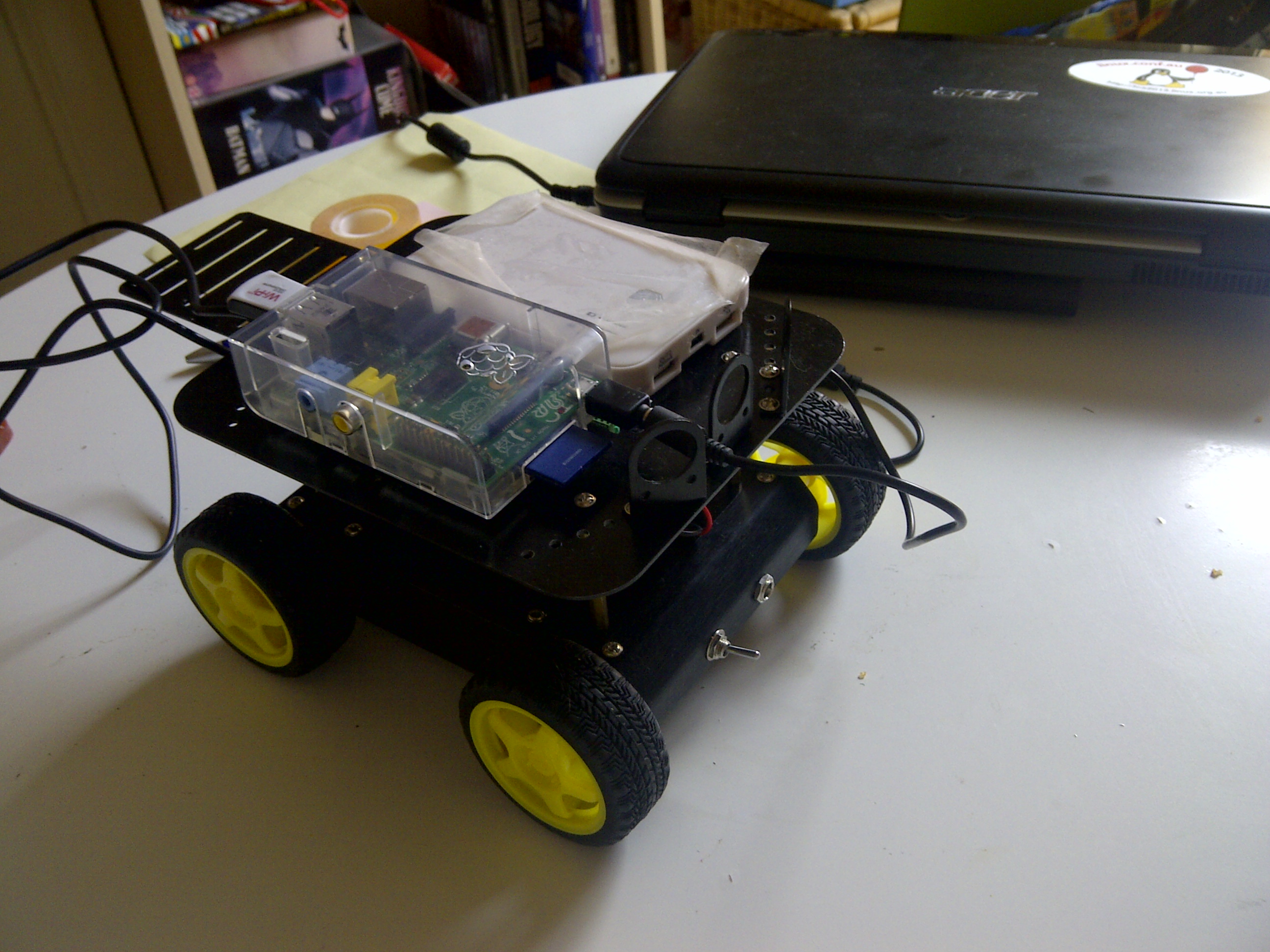
After trying different configurations and spent almost 1 month, we finally got the final product! It’s called Rasinro = Raspberry Internet Rover, sounds a bit Japanese right? What we need: The 4WD rover chassis: 4 dc motors, wheels, decent platform and casing, and pack of 5 batteries. Arduino Device: DFRobot…
Controlling Arduino Motors via Raspberry-Hosted Website (Part 2)
We want to send commands to our remote-control Arduino car. One way to communicate directly with Arduino from Python is through Serial interface. For this we need a Python library called pySerial, which allows direct signal manipulation via serial ports. Installation PySerial is available as a standard Debian package. sudo apt-get install python-serial…
Controlling Arduino Motors via Raspberry-Hosted Website (Part 1)
In ideal geek world, we want to control our Arduino rover miles away via the Internet. Here is some idea on how to do it. Ingredients Hardware 1 Raspberry Pi 1 set of 4WD Rover Platform, like from Dagu or DFRobot 1 solar panel battery 2 usb-to-micro usb cables 1 DFRobot Romeo All-in-One…
Arduino codes for DFRobot Romeo v2 to control motors via keyboard and S1-5 buttons
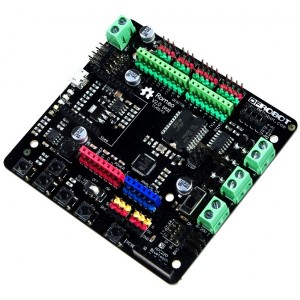
Romeo V2 All in One Controller is an independent motor controller that can run without any PC. We can program the 5 buttons with scripts from Arduino IDE, or we can use the miniUSB port to communicate with a Raspberry Pi. This board can control 2 motor channels, and several…

Raspberry Pi Motor and Servo Controller Expansion boards
Raspberry can control Motor and Servo with the help of its various expansion helpers. The main difference betwen DC motor and servo is that motor will only have 2 wires: positive (red) and ground (black), whereas servo have 3 wires: positive (red), negative (black), and signal (white). There are a…

")
