
Robot Project Day 8 – Tilt servo for hand gripper (claw)
After testing all the basic functions of a robot in previous post, a nice additional feature of a robot is to include a hand gripper. You can purchase a pan & tilt kit for standard servo and a hand gripper kit which you can combine to create a nice pick-grip-release motions. For hand…
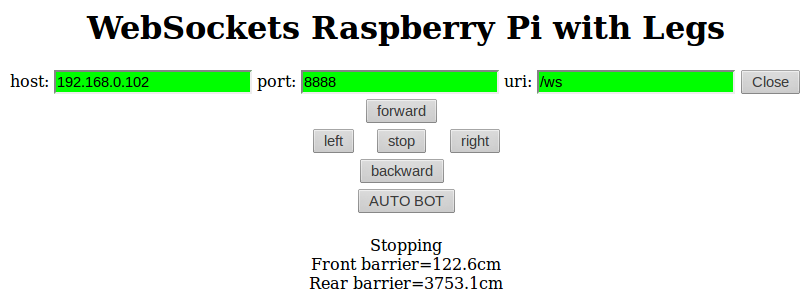
Raspberry Pi + Pololu Maestro + Python3 + Tornado + Servo Control Part 3
So we have all the backbone software ready as discussed in Part 2, now we want to create the interface. We basically need JQuery to handle the button interaction. Once a button is clicked, it will send a command to the server via WebSocket. The server needs to relay the…

Raspberry Pi + Pololu Maestro + Python3 + Tornado + Servo Control Part 2
In Part 1 we discussed ways to connect all the hardware together. For there software component, there are 4 different technologies involved: Device.py, which provides byte commands to Pololu Maestro discussed previously. DeviceController.py, which provides servo control via function calls on the Device Driver object. TornadoServer.py, which serves the web…

How to play piezo buzzer tunes on Raspberry Pi GPIO with PWM
1. Connect the red wire of the buzzer to GPIO Pin 5 and the black one to GPIO ground 2. Copy the following code into buzzer.py 3. Run it with this command: sudo python3 buzzer.py 4. You can also use this as a module in your robot project. import RPi.GPIO…
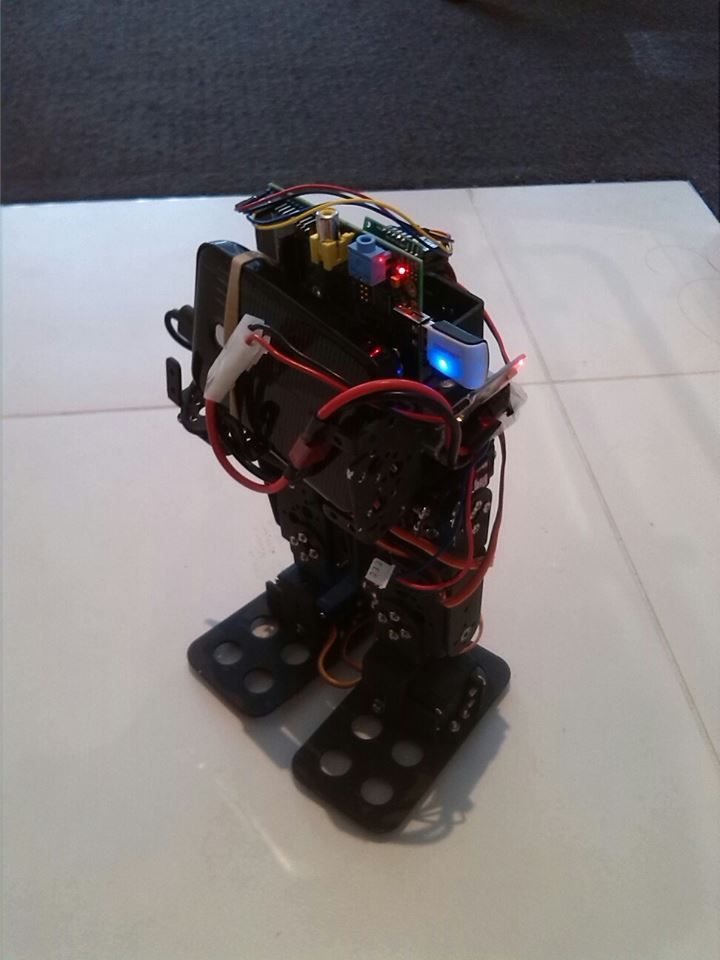
Legged Pi: A walking biped Raspberry Pi robot
Ingredients: Pi Bundle: Raspberry Pi Model A USB Wifi dongle 8GB SD Card running Raspbian Servos: Pololu Maestro 6 channel servo controller 6 mid-size servos Power: 7.2V 1300mAh 2S Lipo battery for the servos 5V 1A NiCD power bank for the Pi UBEC voltage down converter Battery wires & connectors…


